Contact-Implicit Planning for Athletic, Contact-Rich Tasks
A contact-implicit trajectory optimization (CITO) framework for athletic locomotion that works with minimal guidance. The motivation behind our work is to enable imitation learning for athletic locomotion tasks using CITO as a task-agnostic expert.
Framework
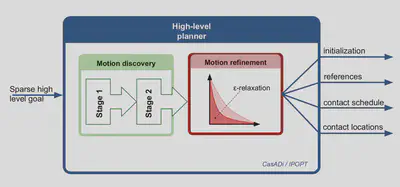
We present a continuation method for contact-implicit trajectory optimization that works with minimal guidance i.e. without a handcrafted initialization nor references. We are able to automatically discover motions and contact schedules given only a terminal goal specified by the user. The generated motion plans are then tracked by a whole-body MPC.
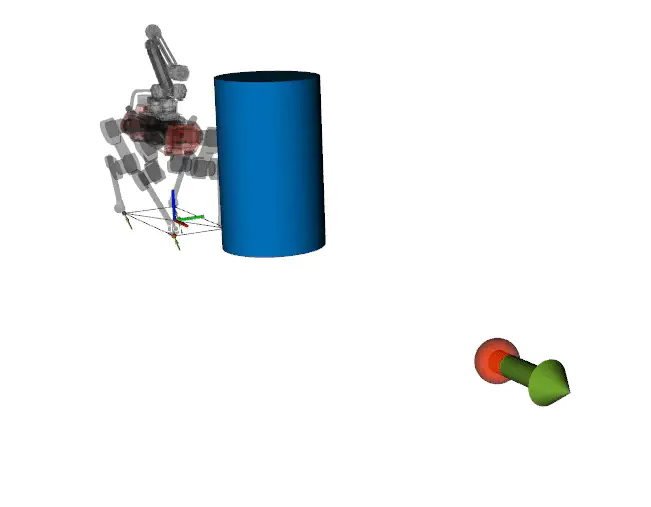
Given only a commanded position (red sphere) and orientation (green arrow) the whole-body motion plan is optimized including gait, foothold positions and base pose references.


Results on hardware
Our novel contact-implicit trajectory optimization formulation in the motion refinement stage gives us a direct handle on the contact modes and is a crucial tool in overcoming the sim2real gap. In addition, through the use of a continuation method the generated motion plan has strict physical feasibility.To prove both of these claims, we tested the motion plans generated by our framework on hardware for a complex, under-actuated legged system.
Report
Stefanos Charalambous
Robotics Intern
My research interests include motion planning, optimal control and learning.